

Description
Object is sensed output 0, output 1 is not sensitive to the time, directly with 3V and 5V microcontroller IO port connected.
Sensing distance 2-40 cm, distance, good anti-jamming capability. (Note: The infrared sensor can not detect all objects get the same distance, objects of different colors of light reflectance of different objects closer darker black shorter distance detected, the sensor 2-40 cm is measured against the white wall of)
Speed, suitable for smart car obstacle avoidance, black and white line tracking, anti-drop, product counters, cutting lines, liquid level detection.
This sensor is made with black and white lines tracing the car ran without black line on white paper, available in concrete The yellow complex environment such as the black line patrol track. As long as the black line around the slightly lighter color than black can, eliminating the traditional moves, so that environmental layout easier.
The sensor 3 to 6V supply, wide range, suitable for 3V and 5V MCU system.
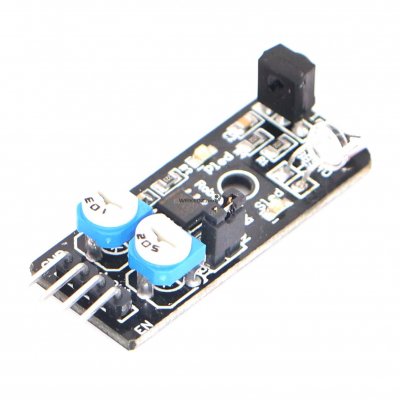
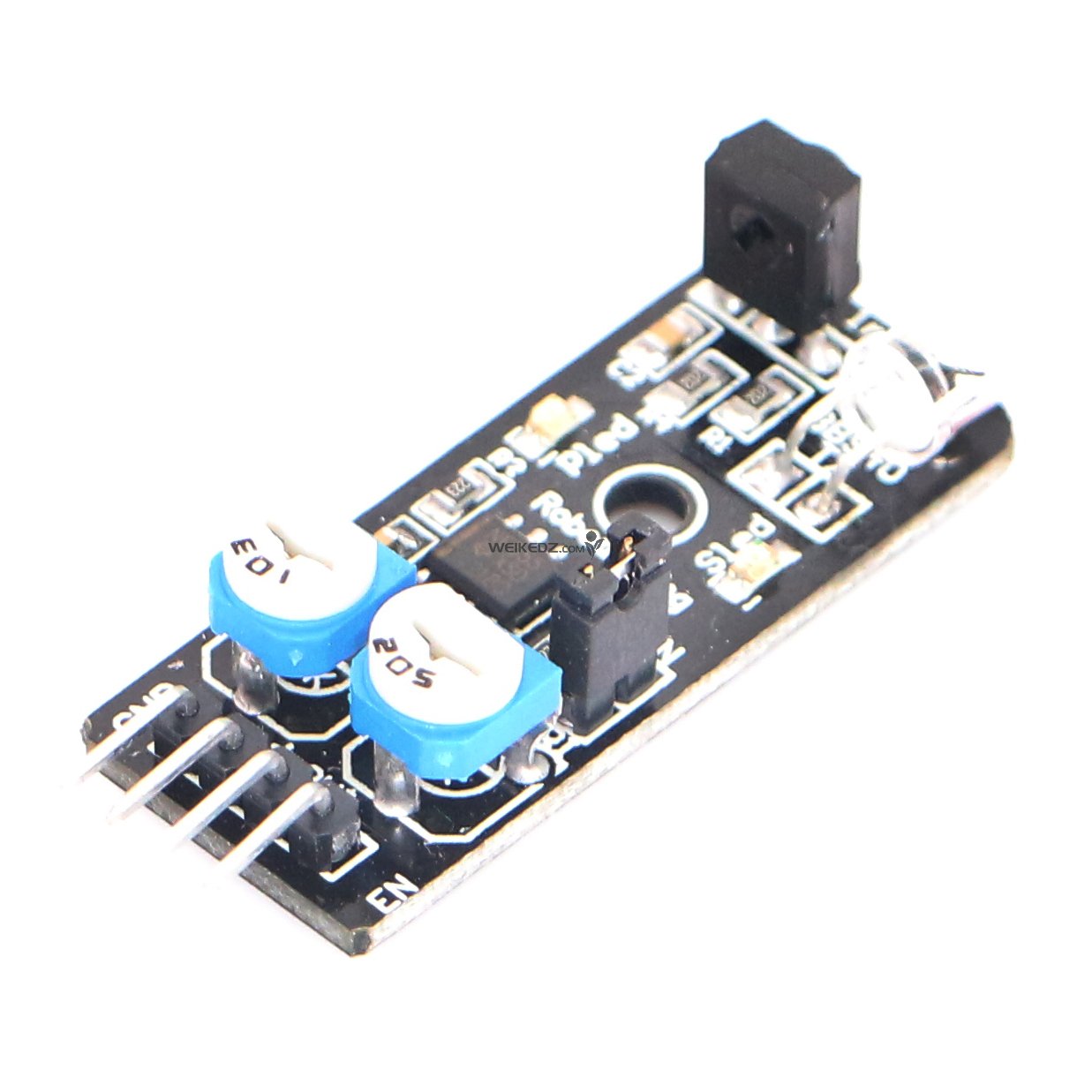
With Enable, EN terminal is equal to "1" when the sensor does not work, equal to "0" when working. Jump on the sensor end cap long after the EN grounding plug (EN long as "0"). To use the EN pin when the jumper cap is removed.
Frequency adjustment potentiometer is used to adjust the carrier frequency of the infrared emission tube, because the integration receiver 38KHZ in particular when the carrier frequency is the most sensitive. The 502 resistor clockwise transferred do (that is, the launch tube at maximum brightness), and then at a white wall tone 103 resistance, has been transferred to the sensing distance is the farthest so far so that the sensor will work in the best state
Working voltage: DC 3.3V-5V
Working current: 20mA
Working temperature: -10degree+50degree
Detection distance : 2-40cm
IO interface: 4 line (-/+/S/EN)
Output signal: TTL Level
Adjusting mode: Multi resistance regulation
Effective angle: 35°
Size: 4.5x1.1cm(approx)
Here we use the obstacle avoidance module and digital 13 interface with LED to build a simple circuit, making the obstacle avoidance warning light, accessing the avoidance sensor to digital 3 interface, when the obstacle avoidance sensor senses the signal, LED light, otherwise off.
Program code:
int Led=13;//define LED interface
int buttonpin=3; //define obstacle avoidance interface
int val;//define Digital variable val
void setup()
{
pinMode(Led,OUTPUT);//define LED is output interface
pinMode(buttonpin,INPUT);//define obstacle avoidance is output interface
}
void loop()
{
val=digitalRead(buttonpin);//reading the value from 3 digital interface to val
if(val==HIGH)//when the obstacle avoidance sensor senses the signal, LED flash
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}