Weike Electronics is a professional manufacturer and exporter that is concerned with the design, development production and marketing of arduino, 3d printers, raspberry pi and STM32. Our Dream is to make the best price and best quality produce for customers. So we would like to receive your valuable suggestions for our products and we can improve them for you.
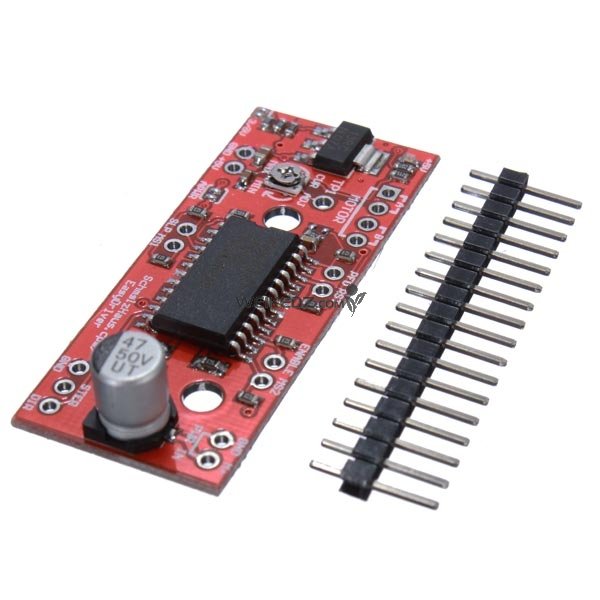
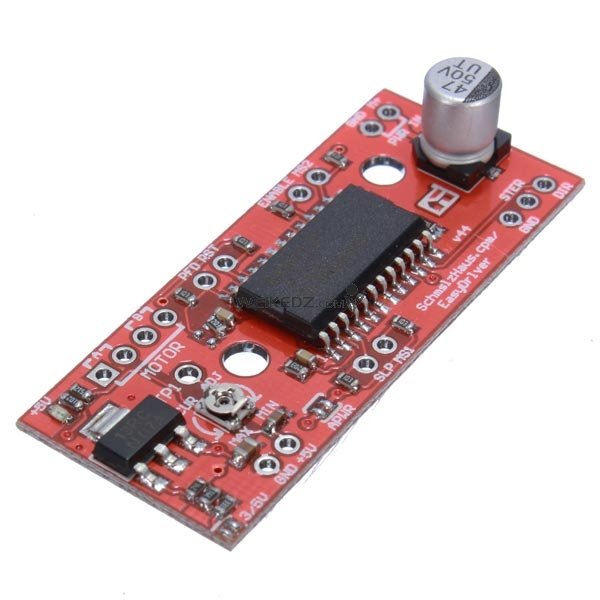
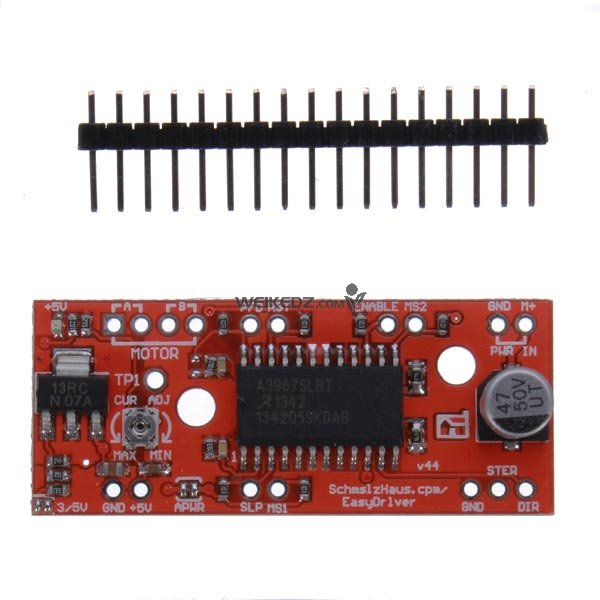
Description: Stepper motor is usually defined with stepping angle or numbers of steps parameter, the general motor revolution is divided into 200 steps, which is the step angle of 1.8 degrees, EasyDriver has the function of interval subdivision, this driver board subdivision 8 segments, that is, each step of the motor is subdivided into 8 small step, this can be more precise control, that is to say, the EasyDriver needs to 1600 steps to complete a full 360 degree rotation. a3967slb PWM constant current control micro step distance driving for two phase stepper motor drives which is produced by allegro company in the United State. Its working voltage up to 30v, the drive current is 750ma, a a3967slb can drive a two-phase stepper motor drive and achieve 8 segments. The chip pwm current control circuit can be added to the pfd voltage and set to slow, fast and mixed three current-decay mode, if the voltage is higher than pfd end 0.6vdd, select slow decay mode. If less than 0.21vdd, then select the fast decay mode. Between the two decay modes is mixed mode. In addition, a3967slb also provide comprehensive protection measures, including transient voltage suppression, overheat protection against current through, under-voltage self-locking function. No additional other interface circuit between a3967slb and microprocessor, the chip taken easystepper interface, made 8 control lines reduce to 2 ( step and direction ), just need to simply enter the stepper motor control's pulse , its embedded converter can be achieved on the stepper motor control. A3967slb need some resistors, capacitors to adjust its operating parameters, the whole drive circuit is very simple.
Specification: Ms1 and ms2 is the logic input port that selected by subdivide resolution of the stepper motor. Dir is the selects mouth of running direction of motor. Reset is used for reset the chip's original value, block all external output. Step is the pulse input port. Out1a, out1b, out2a, out2b is the h bridge's two pairs of output ports. Enable is enable end. sense1, sense2 is the h bridge's current sense resistor. Ref is the reference voltage. Qnd is logic and power. Rc1, rc2 is h bridge fixed deadline analog input.